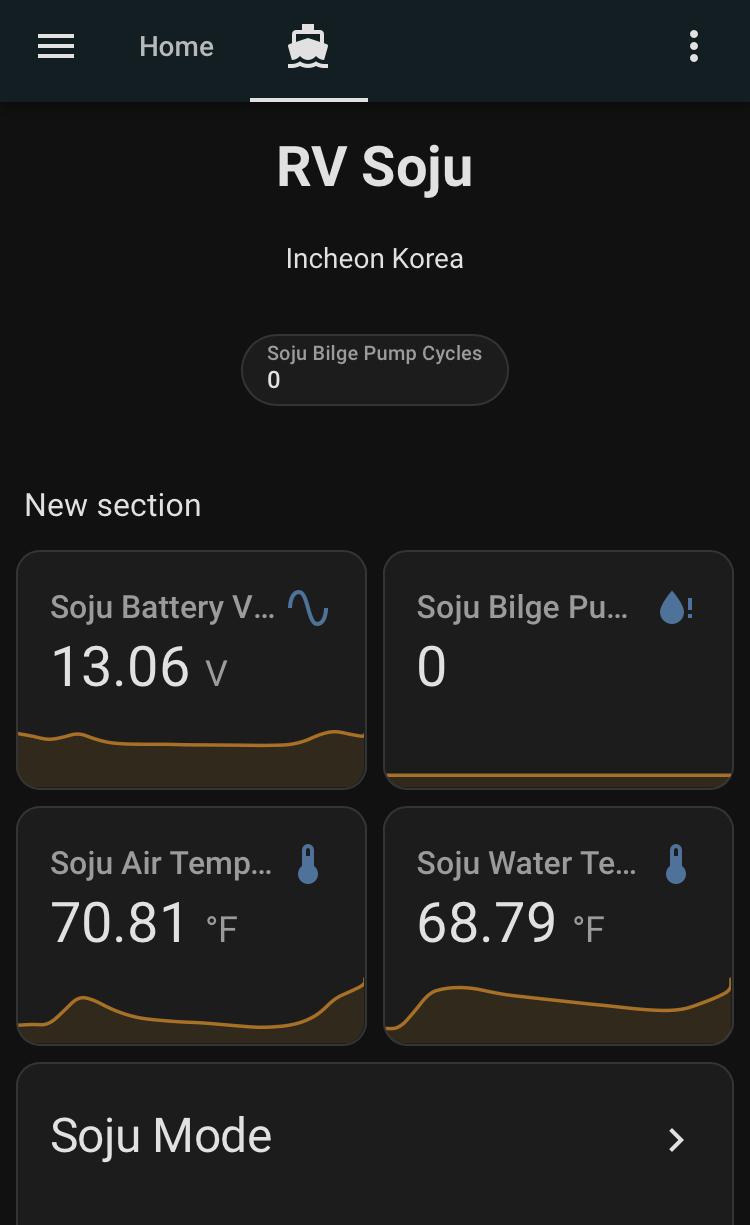
Latest #robot in sea trials. An old 12v trolling motor provides propulsion. A #RaspberryPi pico is always-on and runs the basics, sensors, h-bridges and such.
An RPi4 will be the main autonomy hub to enable detailed mapping and surveys and such. But for now I can just push #mqtt buttons in #HomeAssistant and move it around.
I built it almost totally out of scrap and epoxy. What a delightful waste of time! 😜
P. S. Note the #lego crew on the bridge.