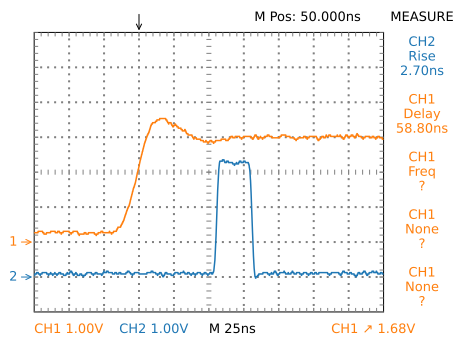
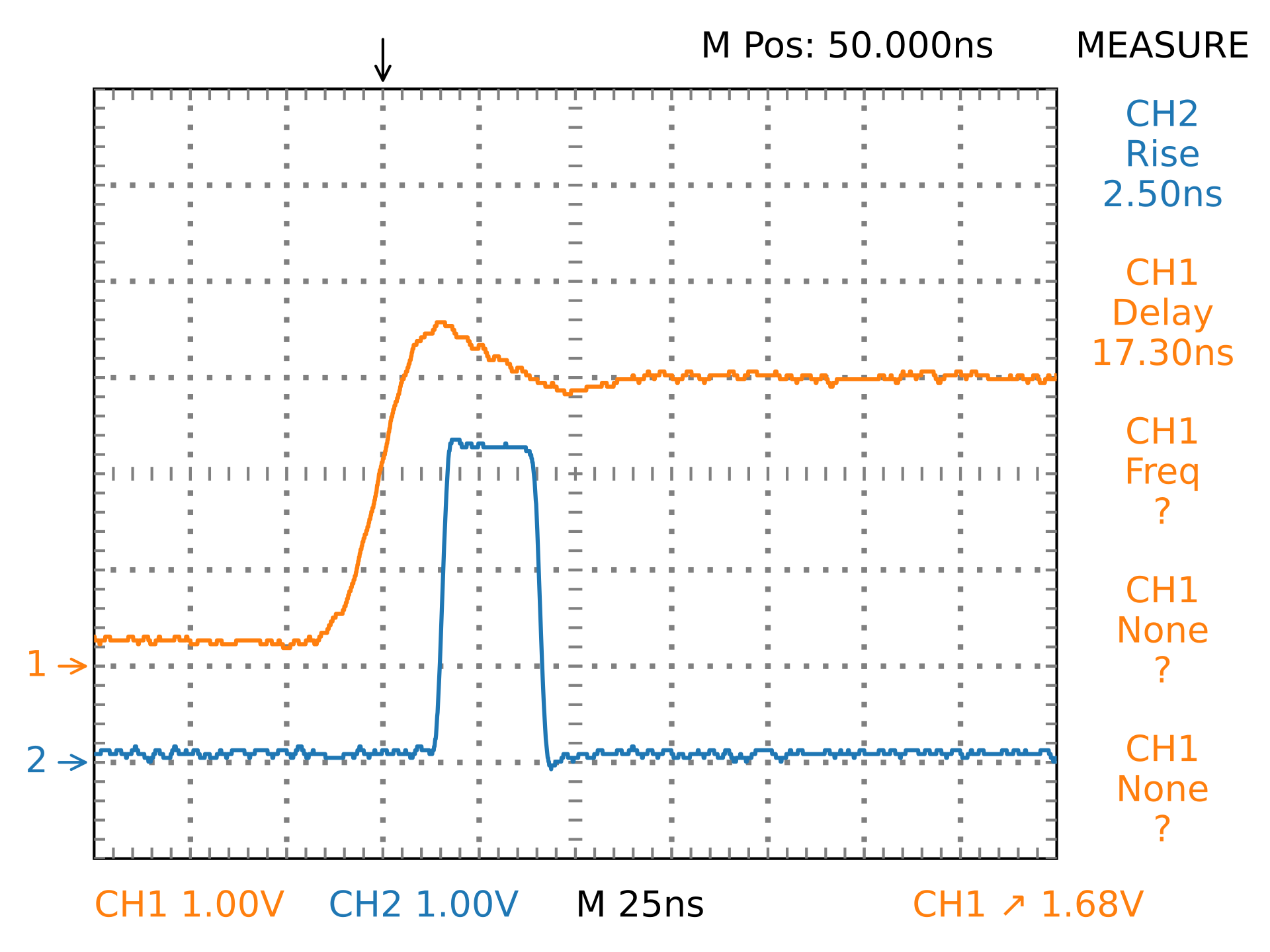
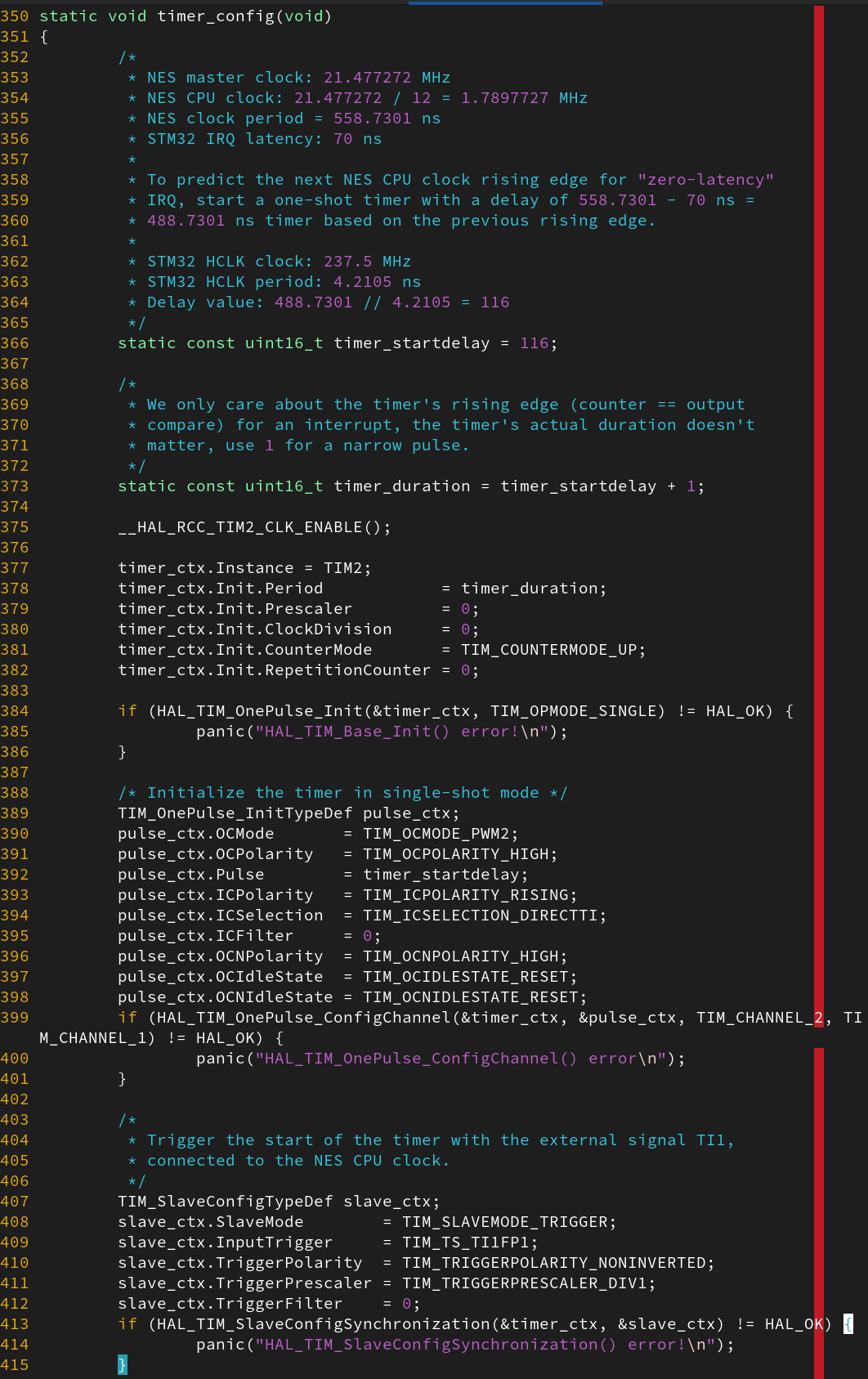
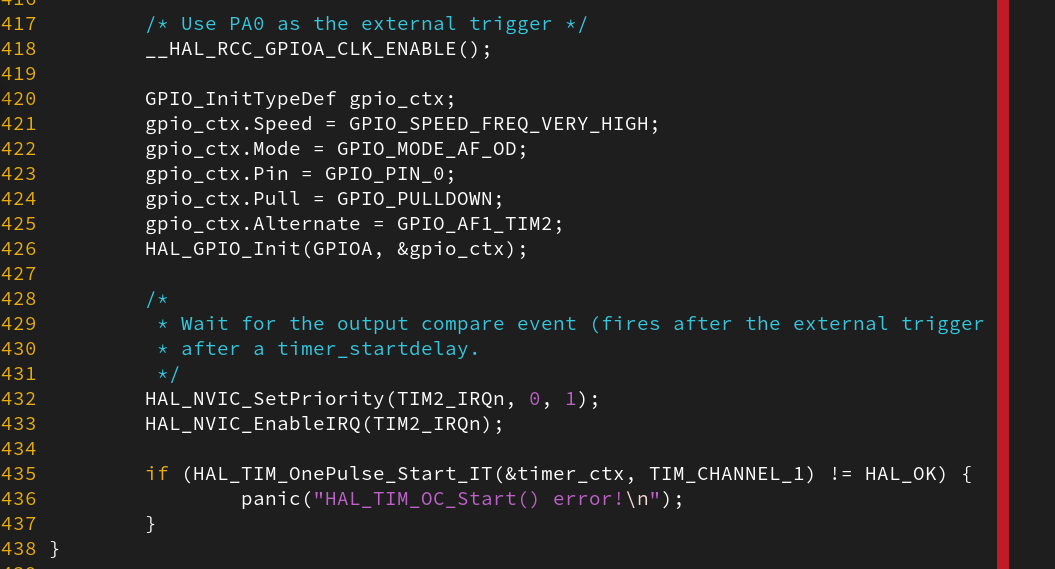
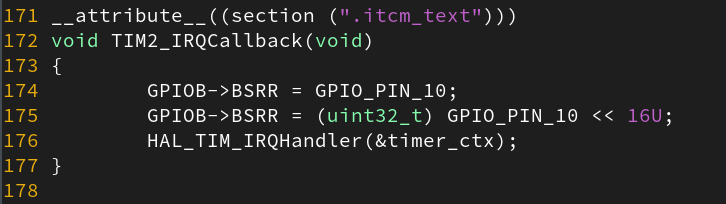
Keep optimizing IRQ latency on the STM32H743 @ 480 MHz. I decided to try an event loop using the WFE instruction instead of IRQs, and I managed to get 60 ns input-to-output latency. I suspect this is the best possible latency. Latency did not improve by abusing QSPI controller to generate a write request (in fact it slightly degraded), even if the QSPI controller is physically close to the CPU. Clearly, passively monitoring signals is not the way to go for bus emulation. Perhaps the solution is predicting the clock before it even arrives, by internally generating a phase-shifted version of it. #electronics #STM32