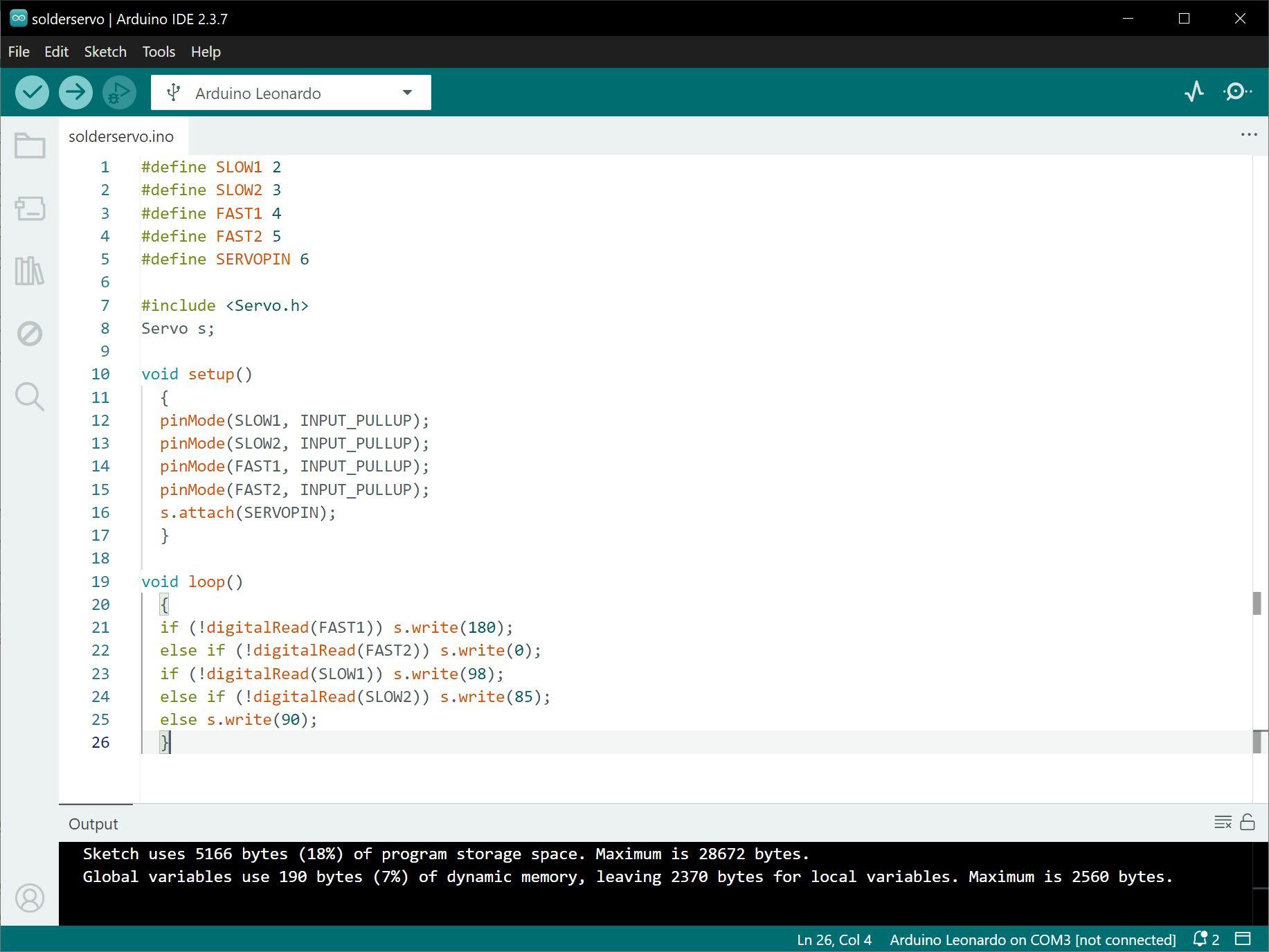
The code for this thing is dead simple - it reads from four buttons, then an if-then-else tree says what the servo does.
A regular servo gets commanded to positions expressed in degrees - 0 is fully one way, 90 centred, 180 fully the other. A continuous rotation servo like this one takes the same commands, but those values become relative speeds - so zero and 180 are full speed one way or the other, and 98 and 85 are the closest values I could get working for the slow feed option. #Arduino